The eClutch mod allows the gearbox to remained locked when the clutch pedal isn’t pressed. It is done by a small servo motor, controlled by Simhub through the Arduino.
The servo is powered by an external power supply.
On the la Button Plate, the 13th function allows to enable or disable the eclutch.
Summary
1) Shopping list (V9.1 only)
- A servo motor MG996r(Amazon, Aliexpress)
- Power supply 6V 2A (Amazon, Aliexpress)
- Connector DC 5.5mm (Amazon, Aliexpress)
- DIN912 : M3x10
- DIN912 : 4 x M4x10
- DIN7991 : 2 x M3x10
- DIN7991 : M3x16
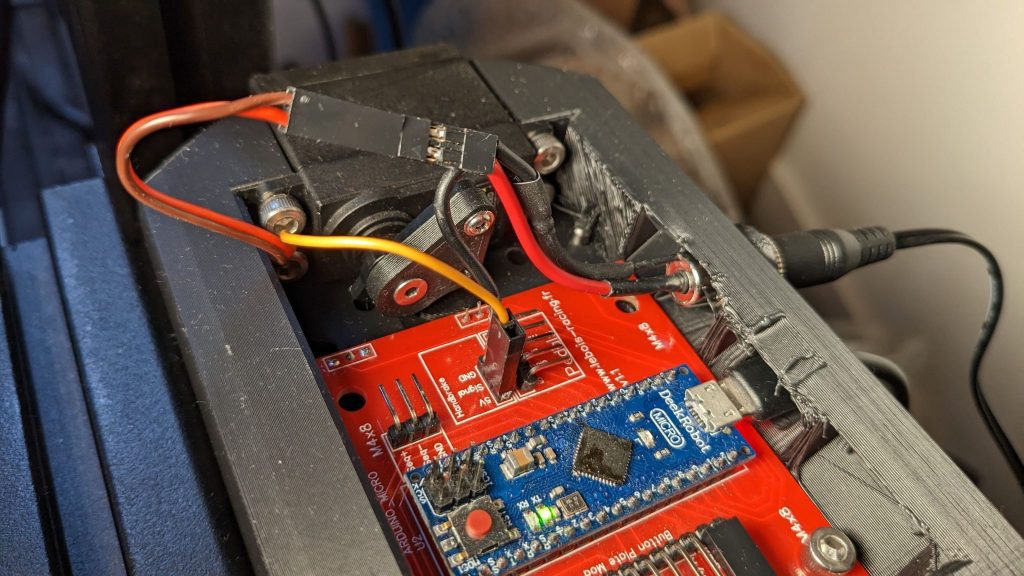
2) Wiring
The PCB of the V9 does not foresee a specific port for the servo motor, but it can be connected to the hand brake port:
Yellow : data (“signal” is written)
Brown: GND
The DC connector brings power to the servo (red +, brown -). The ground of the servo needs to be also linked to the PCB.
DO NOT CONNECT THE 12V PIN TO THE ARDUINO! DO NOT ATTEMPT TO POWER THE SERVO THROUGH THE ARDUINO!
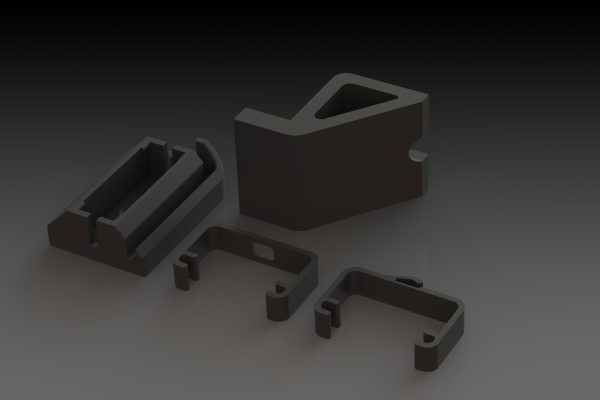
3) 3D files
The files are available in the folder “mod eClutch” from the 3D file archive.
4) The code
Before activating the function in the code, it is advisable to test the correct operation of the servo. For this we will use the example code provided with the Arduino software. Once the IDE is launched, go to “File>Examples>Servo>Sweep”. Before flashing the code, you have to modify the following line:
myservo.attach(9); // attaches the servo on pin 9 to the servo objectBy :
myservo.attach(A3); // attaches the servo on pin 9 to the servo object
Then flash the code. The servo should then go back and forth. If everything works correctly, you can flash the gearbox code again.
You need to use at least the v3.0
You need to replace :
//#define SRTeCLUTCH
by:
#define SRTeCLUTCH
Then you can select the pin on which one you want to plug the servo. By default it is plugged on the pin A3.
5) Simhub
In Simhub, once the arduino is connected, you must enter the following line of code in the “Custom Protocol” field:
'120' +';'+
'105' +';'+
'50' +';'+
format([Clutch],0)
+';'
+format([DataCorePlugin.GameRunning],0)
+';'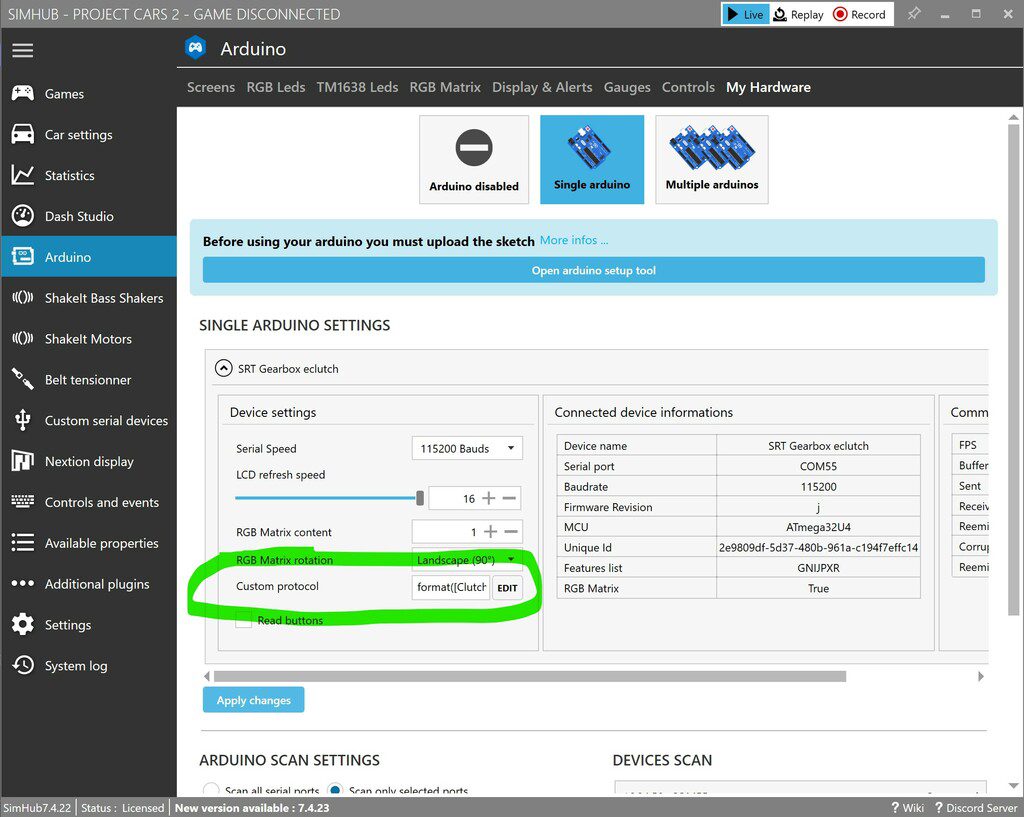
The first three lines are the parameters to be adjusted during assembly:
The first number is the “unlocked” position of the servo: make sure that the gearbox is free in this position and in particular that the plunger screw does not rub against the slider.
The second number is the “locked” position: make sure that the gearbox is correctly locked in this position, without the plunger going too low, and making the servo motor force and heat up. On the V9.1, this number should be lower than the unlocked position. On the V9.0, this number must be higher than the unlocked position.
The third number determines what percentage of the clutch pedal is fully released. Example: 60 implies that at 60% of the clutch pedal, the gearbox is free to move. Acceptable values range from 0 to 100.
Note:
- The “unlocked” position is registered in the arduino during the connection to simhub. It is therefore necessary to connect to simhub for the first time so that the unlocked position is saved.
The simhub parameters can be modified even in game : once modified, click on “apply” and after 5 seconds the parameters will be taken into account.
6) Assembly
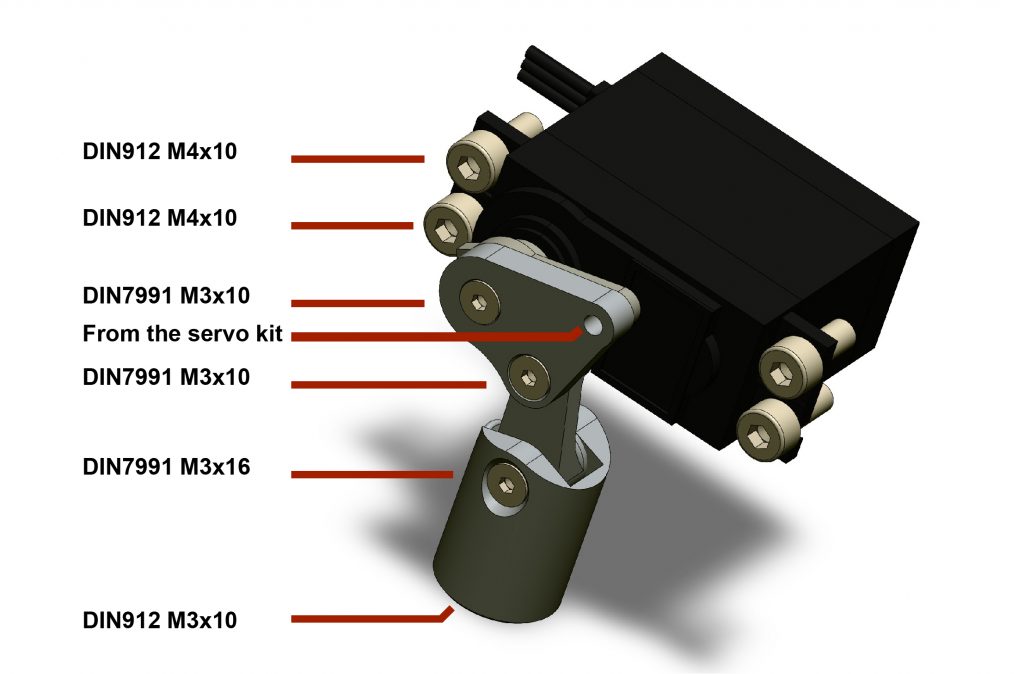
You will need to use one screw that comes with the servo motor, and also cut one plastic arm.
For the assembly, please follow the following steps :
- Install the DC connector next to the USB exit on body 2
- Plugged the servo to the arduino
- Activate the mod in the code
- Connect the Arduino to Simhub
- Launch the game and go on track and wait for the clutch to be in locked position (you can press the clutch pedal to check if the motor is responding correctly).
- Install all the mechanism while the servo is still in locked position, while checking if the gearbox is still locked in this position. You can directly adjust the value in Simhub
If the servo forces (it makes noise all the time), it will heat up and may deteriorate.

Hello. Were is
“3D files
The files are available on the Google Drive in the folder “mod eClutch””
?? 😉
sorry information corrected.
The folder is in the main archive
Is it possible to run the servo and handbrake at the same time if the servo uses the handbrake port?
you need to use different pins