You’ve long been asking for Simtools compatibility with SRT80s. I’ve never been in a hurry to develop it, mainly because I found (and continue to find) FlyPT superior. I find it more powerful, more malleable, and better designed for the user. This is obviously a personal opinion, which is bound to evolve as my experience with Simtools dates back several years.
But the lack of recent updates to FlyPT, including the server connection error at start-up, made me doubt the software’s durability. In the meantime, the developer has shown signs of life again, and claims to be actively working on a solution and an update (so all’s well).
The fact remains, however, that there’s no reason to confine ourselves to a single piece of software.
So I can announce it: Simtools compatibility is coming! I’ve already been able to use the simulator in game, and now I just need to find the best way of documenting all this. I’d like to take this opportunity to thank the members of the Discord and the Simtools developer for their help.
I also intend to keep the FlyPT solution: the documentation will offer both solutions.
First drafts
The good news is that you can use Simtools and FlyPT without modifying the arduino code: in fact, I’m running tests on my Control Box Competition, switching from one to the other.
The interface has exactly the same parameters as FlyPT:
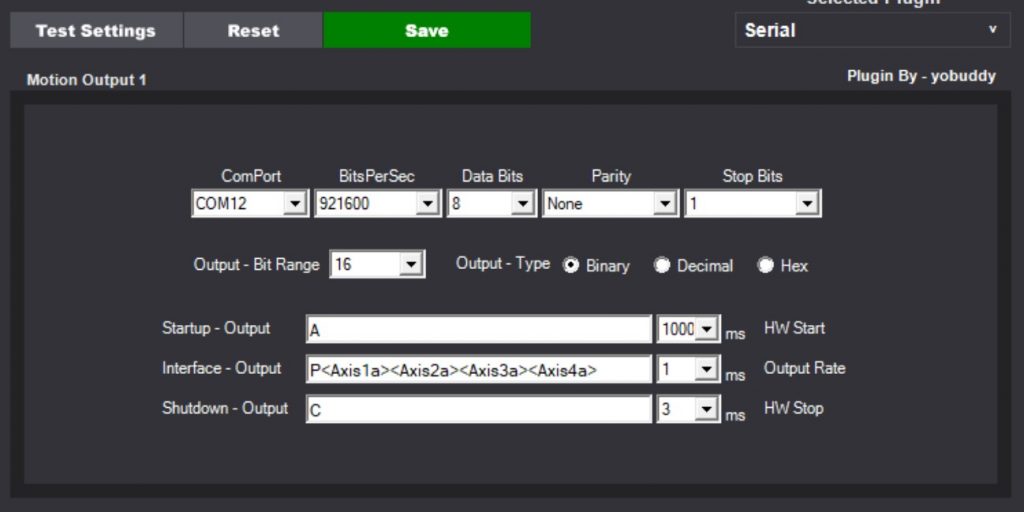
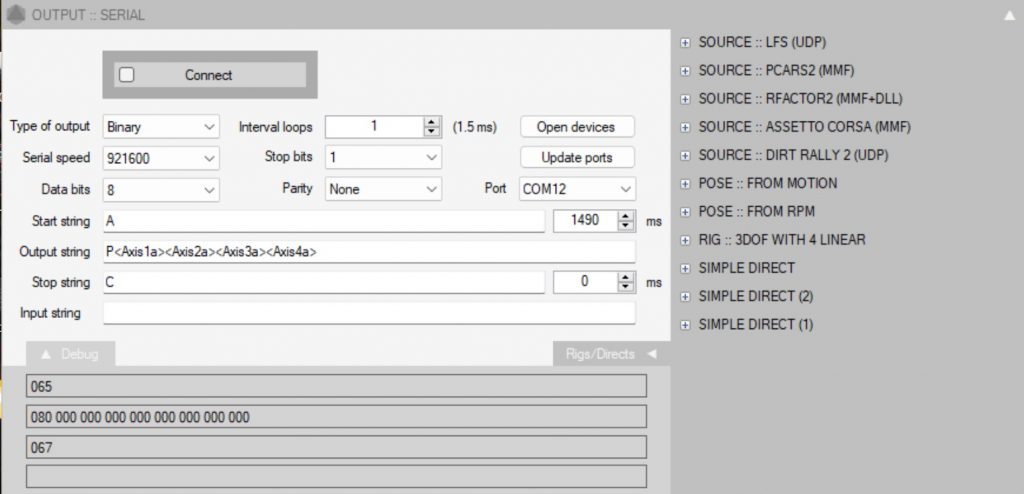
Setting the axes gave me a bit of trouble, as the logic was new to me:

Now it’s time to fine-tune the settings!
Traction Loss
You’ve been asking for it for a long time: a Traction Loss platform. I’ve been working on it for several months, and a Patreon member is currently testing it. I’m also starting to set up the documentation, so it’s coming soon. I hope to be able to add this DOF to my simulator in the coming months.

So stay tuned!

